利用非视距成像和深度学习技术 可帮助自动驾驶汽车发现道路拐角后面的危险因素
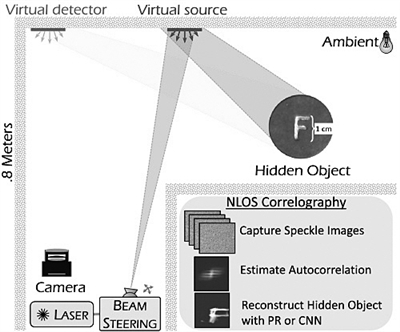
非视距成像系统技术示意图。
美国研究人员创建出一种新型非视距成像系统,其利用深度学习技术,可快速对拐角后面的物体进行高分辨率成像。研究人员称,随着技术发展,该系统有望在自动驾驶、航天探测等多领域发挥作用,如帮助自动驾驶汽车发现道路拐角后面的危险因素、帮助航天探测器拍摄小行星洞穴中的图像等。
在最新一期美国光学学会期刊《光学》上,研究人员介绍了他们的研究成果。该成像系统使用了市售的相机传感器和功能强大的激光光源。激光束从角落或障碍物周围的墙壁反射到隐藏的物体上,物体散射的光子会再反射到墙壁上,形成散斑图案,这种散斑图案编码了隐藏物体的形状,对其进行解析,即可获得隐藏物体的图像。研究人员利用从噪声模型中采集的合成数据,训练了一个深度卷积神经网络,有效解决了相机短时曝光产生的噪声干扰问题,进而能在不到1秒钟时间内完成对隐藏物体图像的重建。
该系统主要用于对非常小的物体进行高分辨率成像,但也可与一些对大型物体(如房屋)进行低分辨率成像的系统结合使用。研究人员在报告中称,该系统可以分辨1米外隐藏物体的亚毫米级细节。在技术测试中,他们将成像装置放在距墙壁1米远处,然后对隐藏在角落里的1厘米高的字母进行快速成像。使用四分之一秒的曝光时间,他们得到了分辨率为300微米的重建图像。
该研究由莱斯大学、普林斯顿大学等机构研究人员联合完成,是美国国防部高级研究计划局REVEAL项目的一部分,该项目旨在开发各种技术来对拐角处的隐藏物体进行成像。研究人员指出,非视距成像技术在医学成像、导航、机器人以及国防领域都具有重要应用价值。他们的新系统无论是在空间分辨率还是在成像速度上,都远超现有的非视距成像系统。目前,他们正在研究通过扩展视场使系统对更大物体进行成像,让这种系统更具有实用性。
运行iOS 14的iPhone都能破解?全新越狱工具一直兼容到iPhoneX系列
科技 2021-03-16 11:15:17
国产Longsys DDR5内存横空出世!纠错能力增加提高数据完整性
科技 2021-03-16 11:10:12
8热管+2风扇王者级散热!索泰RTX 3070 PGF OC拆解图赏
科技 2021-03-16 10:57:05

苹果汽车“C1”芯片可通过眼球追踪技术代替菜单导航 最早2025年才会发布
科技 2021-01-20 11:31:10 我国已建成5G基站71.8万个 2021全国有望新建5G基站超100万个
科技 2021-01-19 10:34:58
台积电拟 “风险生产” 3nm 芯片,尚未到批量生产最终产品阶段
科技 2021-01-18 11:32:23
三星电子最快一季末下调NAND闪存价格 或将引发厂商之间价格战
科技 2021-01-15 14:58:12
英特尔宣称7nm制程获重大进展 或有可能掏钱转而外包生产芯片
科技 2021-01-14 11:14:06
ARK基金推出太空探索ETF:ARKX 预计2024年年底股价将达到7000美元
科技 2021-01-14 10:58:49
幻13全能本领衔 《ROG Citadel XV》游戏上线 真正沉浸式互动
科技 2021-01-14 10:57:07




 营业执照公示信息
营业执照公示信息
相关新闻